
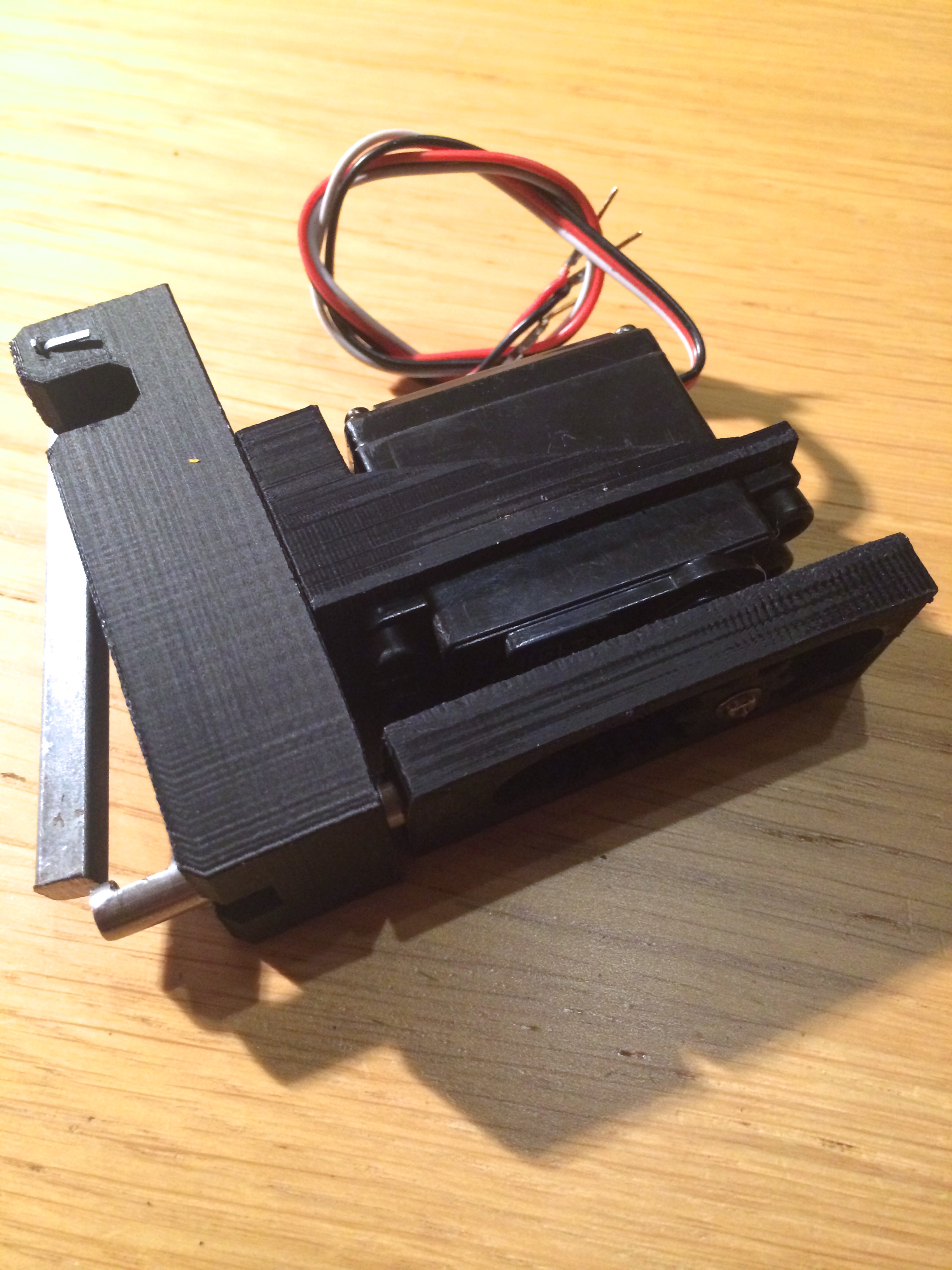
 Nu tror jag att jag lyckats förenkla och minimerat alla svaga länkar i konstruktionen. Det finns inte så mycket som kan gå fel, och det är relativt enkelt att montera utan några större justeringar. Jag skulle naturligtvis kunna optimera kuggstångssläden så att den blir lättare att passa in när man monterar ihop delarna. Jag upptäckte när jag testade konstruktionen att servot drar åt fel håll jämfört med logiken i programmet, men det är betydligt enklare att byta ut en etta mot en nolla, än att spegelvända kuggstångssläden. Nu ska jag försöka hitta en bra och kompakt apparatlåda som rymmer både servomekanismen och kretskortet. Jag kan inte vara annat än nöjd så här långt i EquiFeeder-projektet.
Nu tror jag att jag lyckats förenkla och minimerat alla svaga länkar i konstruktionen. Det finns inte så mycket som kan gå fel, och det är relativt enkelt att montera utan några större justeringar. Jag skulle naturligtvis kunna optimera kuggstångssläden så att den blir lättare att passa in när man monterar ihop delarna. Jag upptäckte när jag testade konstruktionen att servot drar åt fel håll jämfört med logiken i programmet, men det är betydligt enklare att byta ut en etta mot en nolla, än att spegelvända kuggstångssläden. Nu ska jag försöka hitta en bra och kompakt apparatlåda som rymmer både servomekanismen och kretskortet. Jag kan inte vara annat än nöjd så här långt i EquiFeeder-projektet.
Alla mina projekt
En blogg om mina projekt

Category Archives: EquiFeeder
Motorbaxning och 3D-design





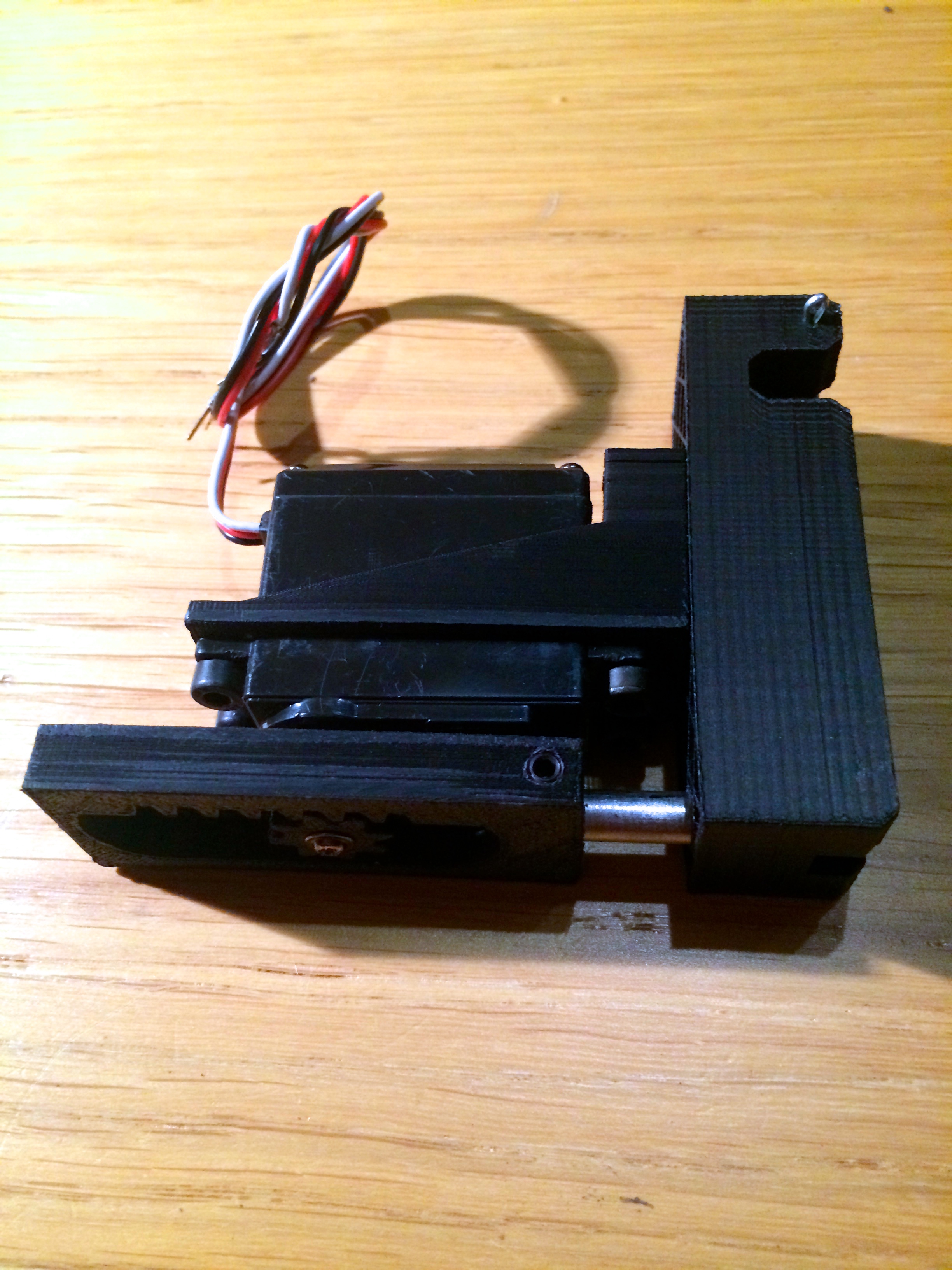
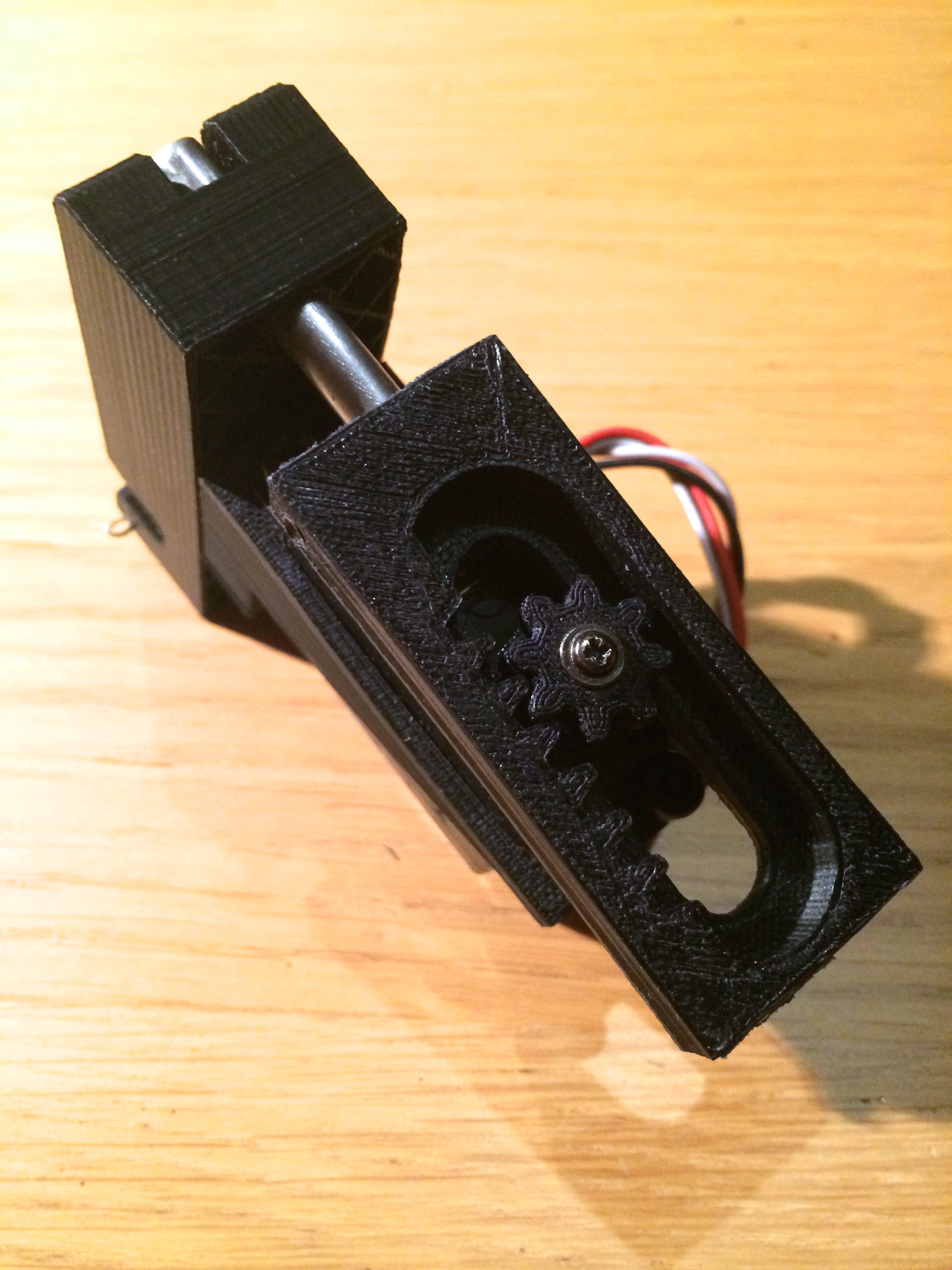
 Idag har Svante och jag äntligen baxat motorn på plats. De specialdesignade tyrbultarna till svänghjulet hade vi nog inte klarat oss utan. Millimeter, för millimeter – centimeter för centimeter höjde vi, och förflyttade motorn i läge med hjälp av domkrafter och kedjespel. Det tog lite drygt 3 timmar att få motorn på plats. Inte utan att vi stötte på motstånd, eller att jag kastade ur mig en och annan svordom, och klagade över att vi hela tiden stötte på motstånd, så får vi betrakta dagens övning som riktigt lyckad. Annars har jag den senaste tiden ägnat en hel del tid framför datorn för att designa detaljer som ska ingå i EquiFeederns utlösningsmekaniskm. 3D-skrivaren har gått varm, och åtskillig tid har gått åt till att justera och trimma in skrivaren så att detaljena blir så bra som jag önskar. Varje detalj tar närmare en timme att skriva ut, så det gäller att man mäter och tänker rätt. Å andra sidan så blir nästa kopia identisk med föregående, så det går lätt att göra fler när väl designen visar sig fungera. Nu har jag testat principen med kugghjul och kuggstång för att få en linjär rörelse, utan att riskera att delarna kärvar. Man kan väl säga att det är en fungerande beta-version av mekanismen. Förhoppningsvis blir jag helt klar med hela designen under morgondagen, och kan kalla det för version 1,0 färdig för testning.
Idag har Svante och jag äntligen baxat motorn på plats. De specialdesignade tyrbultarna till svänghjulet hade vi nog inte klarat oss utan. Millimeter, för millimeter – centimeter för centimeter höjde vi, och förflyttade motorn i läge med hjälp av domkrafter och kedjespel. Det tog lite drygt 3 timmar att få motorn på plats. Inte utan att vi stötte på motstånd, eller att jag kastade ur mig en och annan svordom, och klagade över att vi hela tiden stötte på motstånd, så får vi betrakta dagens övning som riktigt lyckad. Annars har jag den senaste tiden ägnat en hel del tid framför datorn för att designa detaljer som ska ingå i EquiFeederns utlösningsmekaniskm. 3D-skrivaren har gått varm, och åtskillig tid har gått åt till att justera och trimma in skrivaren så att detaljena blir så bra som jag önskar. Varje detalj tar närmare en timme att skriva ut, så det gäller att man mäter och tänker rätt. Å andra sidan så blir nästa kopia identisk med föregående, så det går lätt att göra fler när väl designen visar sig fungera. Nu har jag testat principen med kugghjul och kuggstång för att få en linjär rörelse, utan att riskera att delarna kärvar. Man kan väl säga att det är en fungerande beta-version av mekanismen. Förhoppningsvis blir jag helt klar med hela designen under morgondagen, och kan kalla det för version 1,0 färdig för testning.
Frigörningsmekanism för EquiFeeder

 När man har lösningen i sin hand, är det lätt att tänka på ord som självklart, och hur annars? De senaste dagarna ägnade åt EquiFeedern har gått åt till att försöka hitta en bra frigörningsmekanism. När jag började fundera fanns det en hel del saker att ta hänsyn till. Jag vill för det första ha en så kompakt lösning som möjligt. En annan viktig sak är att det inte ska kunna komma in regnvatten i apparaten. Samtidigt måste servot kunna orka dra, eller skjuta bort sprinten som håller i lasten, eller som i det här fallet – hönätet. Efter att försökt med tre olika mekanismer – som alla hade olika “problem”, kom jag i morse på hur jag skulle göra för få en funktionssäker, kompakt och vattensäker och relativt okomplicerad mekanism. Nu har jag testat med laster från ca 300 gram till 15 kilo, untan minsta tecken på problem. Nu återstår att göra ett fäste för servot och kretskortet, så att jag kapsla in allt i valfri apparatlåda.
När man har lösningen i sin hand, är det lätt att tänka på ord som självklart, och hur annars? De senaste dagarna ägnade åt EquiFeedern har gått åt till att försöka hitta en bra frigörningsmekanism. När jag började fundera fanns det en hel del saker att ta hänsyn till. Jag vill för det första ha en så kompakt lösning som möjligt. En annan viktig sak är att det inte ska kunna komma in regnvatten i apparaten. Samtidigt måste servot kunna orka dra, eller skjuta bort sprinten som håller i lasten, eller som i det här fallet – hönätet. Efter att försökt med tre olika mekanismer – som alla hade olika “problem”, kom jag i morse på hur jag skulle göra för få en funktionssäker, kompakt och vattensäker och relativt okomplicerad mekanism. Nu har jag testat med laster från ca 300 gram till 15 kilo, untan minsta tecken på problem. Nu återstår att göra ett fäste för servot och kretskortet, så att jag kapsla in allt i valfri apparatlåda.
GSM och XBee till EquiFeeder

 I väntan på transport av motorn till Moälven, har jag fortsatt utveckla utfodringstimern. Timmarna flyger förbi när man sitte och programmerar, löder och testar. Nu har idén svällt ut till att innefatta en styrenhet med flera slavar som man ska kunna koppla ihop trådlöst. Styrenheten ska kunna styras från själva enheten med hjälp av knappar, via en GSM-enhet, och via Internet, om tillgång till nätverk finns. Igår satt jag hela dagen och skrev kod för styrning via SMS. En och annan bugg har dykt upp längs vägen. Eftersom det inte finns någon debugger, är det svårt att felsöka. Man får börja enkelt, och sedan steg, för steg testa att allt fungerar. Sedan måste man ju ta hand om mänskliga fel. Jag har kommit så långt att jag kan skicka ett SMS från telefonen till styrenheten och ställa tiden, samt kolla status. Eftersom det blir kostsamt att sätta in en GSM-modul i varje enhet, plus att man måste ha ett abonnemang, kan man nöja sig med en styrenhet, om man fortfarande kan styra ett antal slavenheter. Idag har jag kommit så långt, att jag kan styra en slavenhet via en trådlös brygga – allt från mobiltelefonen, om jag så önskar. Nu har jag testat med några trådlösa enheter avsedda för korta avstånd på cirka 50 meter, men det finns enheter som klarar flera tusen meter. De är visserligen dyrare i inköp, men hallå……det handlar ju om att slippa komma hem för att mata hästarna stup i kvarten.
I väntan på transport av motorn till Moälven, har jag fortsatt utveckla utfodringstimern. Timmarna flyger förbi när man sitte och programmerar, löder och testar. Nu har idén svällt ut till att innefatta en styrenhet med flera slavar som man ska kunna koppla ihop trådlöst. Styrenheten ska kunna styras från själva enheten med hjälp av knappar, via en GSM-enhet, och via Internet, om tillgång till nätverk finns. Igår satt jag hela dagen och skrev kod för styrning via SMS. En och annan bugg har dykt upp längs vägen. Eftersom det inte finns någon debugger, är det svårt att felsöka. Man får börja enkelt, och sedan steg, för steg testa att allt fungerar. Sedan måste man ju ta hand om mänskliga fel. Jag har kommit så långt att jag kan skicka ett SMS från telefonen till styrenheten och ställa tiden, samt kolla status. Eftersom det blir kostsamt att sätta in en GSM-modul i varje enhet, plus att man måste ha ett abonnemang, kan man nöja sig med en styrenhet, om man fortfarande kan styra ett antal slavenheter. Idag har jag kommit så långt, att jag kan styra en slavenhet via en trådlös brygga – allt från mobiltelefonen, om jag så önskar. Nu har jag testat med några trådlösa enheter avsedda för korta avstånd på cirka 50 meter, men det finns enheter som klarar flera tusen meter. De är visserligen dyrare i inköp, men hallå……det handlar ju om att slippa komma hem för att mata hästarna stup i kvarten.
EquiFeeder

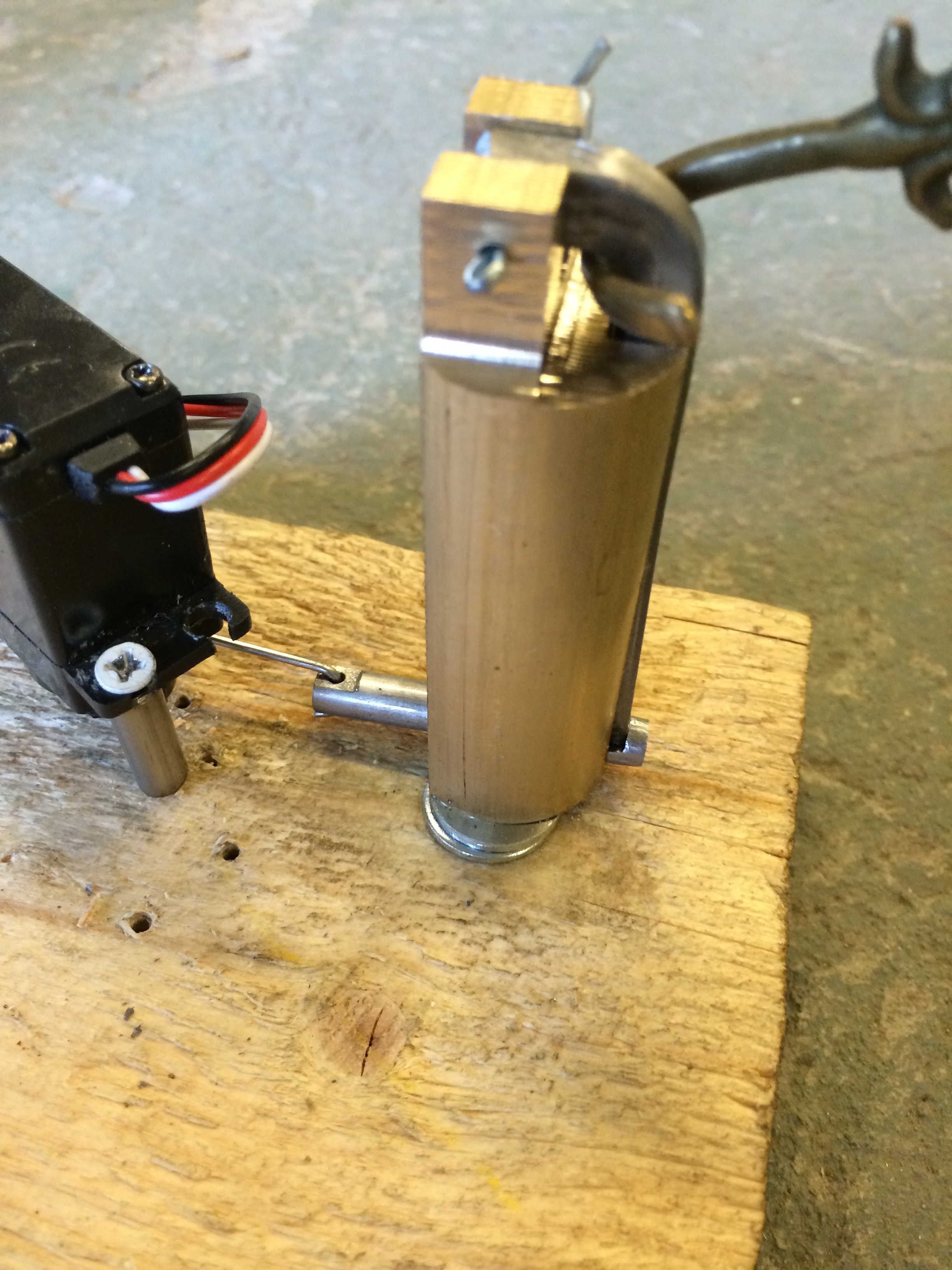
 Igår hade jag så fruktansvärt tråkigt, och visste inte vad jag skulle hitta på. Idag började jag på ett nytt projekt som jag kallar för EquiFeeder (Equi=häst, Feeder=matare). Det finns ju en hel del färdiga moduler som man kan programmera och sätta ihop, istället för att börja helt från början. Valet föll på Arduino. Efter en halv dags knappande var själva timerfunktionen klar. Man kan ställa in 24 timmar med nedrälkning i sekunder. När timern räknat ner skickar jag en signal till ett servo via en av datautgångarna. Jag tillverkade en liten hasp som jag sedan kopplade till servot, och sedan var det dax för ett funktionstest om servot var tillräckligt kraftigt för att dra undan haspen under belastning. Jag riggade upp allt i stallet med ett hönät hängande i ett snöre. Ja – resultatet visas i den här filmen, som jag la upp på YouTube.
Igår hade jag så fruktansvärt tråkigt, och visste inte vad jag skulle hitta på. Idag började jag på ett nytt projekt som jag kallar för EquiFeeder (Equi=häst, Feeder=matare). Det finns ju en hel del färdiga moduler som man kan programmera och sätta ihop, istället för att börja helt från början. Valet föll på Arduino. Efter en halv dags knappande var själva timerfunktionen klar. Man kan ställa in 24 timmar med nedrälkning i sekunder. När timern räknat ner skickar jag en signal till ett servo via en av datautgångarna. Jag tillverkade en liten hasp som jag sedan kopplade till servot, och sedan var det dax för ett funktionstest om servot var tillräckligt kraftigt för att dra undan haspen under belastning. Jag riggade upp allt i stallet med ett hönät hängande i ett snöre. Ja – resultatet visas i den här filmen, som jag la upp på YouTube.